Project Description
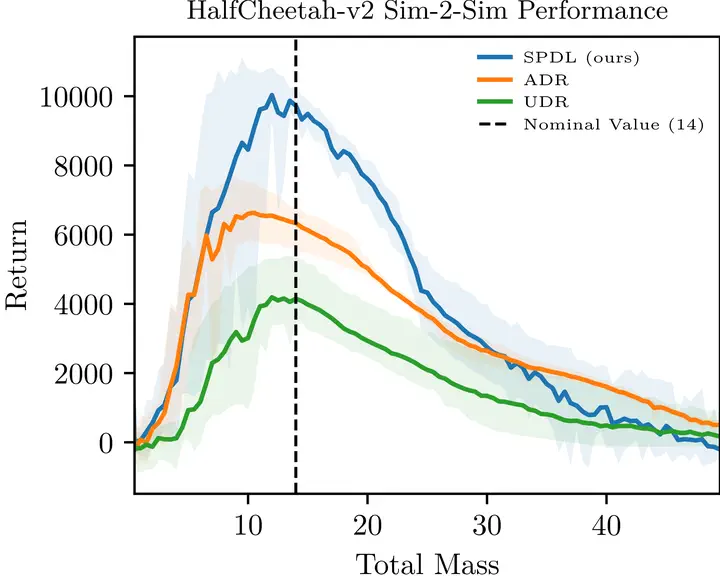
Implemented a novel approach to Domain Randomization based on Curriculum Learning to bridge the Sim-2-Real gap. Evaluated on a real robotic platform (Quanser Qube). The final code was upstreamed to an open-source reinforcement learning library.